英国BAE公司近期表示其正在开发一种新型地球物理武器,即利用激光暂时调整大气环境,能够提高对敌方目标的视觉灵敏度,或者是阻止高能激光武器的攻击。该新型地球物理武器的工作原理是,利用激光来改变地球大气中的电离层,从而帮助监视传感器更好的探测目标,或者破坏激光武器瞄准侦察平台。
BAE公司称其为“激光导致的大气透镜”(LDAL),这一概念利用了克尔效应,即当对某种物质施加电场时,其折射率将发生变化。当高速脉冲激光行经大气时会产生电荷,能使电离层改变为类似透镜的结构。这种透镜有两方面作用,一方面可以通过折射作用改变电磁波的传播路径,使入射波被导入不同的方向,从而使高空侦察传感器获得更多的聚光,提高对敌方目标的视觉灵敏度;另一方面,可以利用激光制造出“等离子体泡”,通过反射和衍射破坏入射激光束的传播,阻止敌方高能激光武器的攻击。另外,这种过程是可逆的,一旦停止发射激光脉冲,大气就会恢复正常状态,不会对环境造成危害。BAE公司表示,有望在未来50年内将这样的系统提供给战场指挥官使用。

BAE提出利用激光提高对敌方目标的视觉灵敏度概念
DARPA启动“流行性疾病预防平台”项目,意图消除病毒性传染病威胁
最近爆发的一些流行性疾病,如寨卡、H1N1流感和埃博拉等,表明全球卫生系统现有的工具和程序已经无法满足迅速控制疾病传播的要求,当威胁出现时,美国甚至全球都无法在短时间内研制出有效的预防及治疗方案。近期,DARPA生物技术办公室提出流行性疾病预防平台(P3)项目,目标是创建一个技术平台,能在病原体被识别后60天内,向医疗人员提供可行的治疗方案,且该方案能在3天内实现对患者的保护。P3项目将聚焦在三个领域进行创新性研究:培养所需的病毒用于评估治疗方法;实现抗体的体外快速进化,并增强抗体效力;开发有效的核酸类药物递送方法。
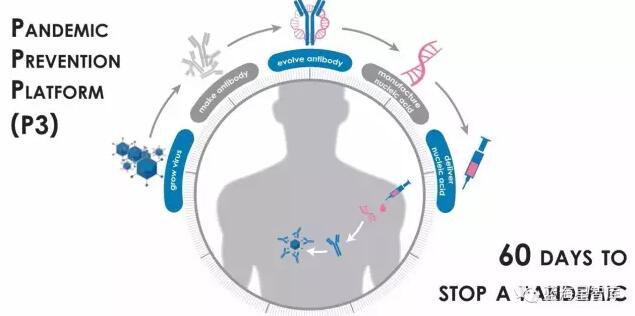
DARPA启动“流行性疾病预防平台”项目
DARPA启动“无线生物”项目,旨在探索电磁信号在生物系统中的作用
DARPA近期宣布启动“无线生物”(RadioBio)项目,旨在探索电磁波是否会在细胞与细胞之间有目的地传输和接收,如果有证据表明的确如此,将研究能够传递什么样的信息。该项目将分两个阶段进行,第一阶段,通过理论建模和仿真模拟电磁信号传递路径,然后用实验测试这些理论预测。第二阶段开发试验台,验证第一阶段中提出的信号传递路径模型,并揭示生物及其他潜在应用领域的设计原理。该项目为基础研究,即使证实了细胞间确实存在电磁信号,离实际应用仍需很多年。
美国科研人员研制出模仿蝙蝠飞行的仿生机器人
伊利诺伊大学香槟分校航空机器人与控制实验室的研究人员研制出一款模拟蝙蝠外形与飞行动作的仿生无人机——Bat Bot。蝙蝠的翅膀构造十分复杂,具有40多个自由度,如果完全模仿所有的自由度将使得机器蝙蝠过于复杂导致无法起飞,因此研究人员们将自由度削减至五个,但仍使机器蝙蝠保留真实蝙蝠57%的飞行动力学性能。Bat Bot无人机总重仅93克,主要由一块微处理器、一个6自由度惯性测量单元(IMU)、5个直流电机、碳纤维框架、翼膜等组成,其中翼膜部分使用的是碳纤维加强膜,厚度只有56微米,轻薄且强度高,翼展47厘米。相比目前使用较为广泛的四旋翼无人机,蝙蝠机器人由于不使用高速转动的机翼,声音较为安静,相对不容易被发现,且能自主飞行,因此可在危险区域更高效地进行侦查,或者辅助救灾。
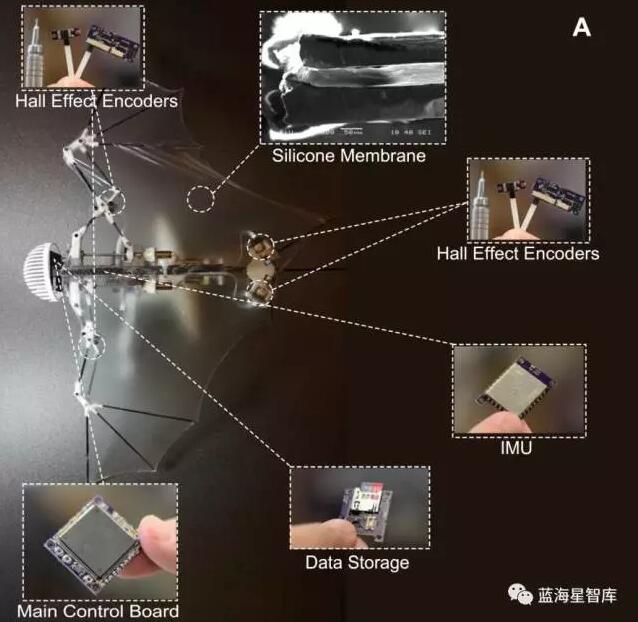
Bat Bot无人机结构图
美国科研人员利用无人机和昆虫机器人勘查灾区
美国北卡罗来纳州立大学的研究人员研发了一种系统,可通过无人机和昆虫机器人勘查大片未知区域(如灾后倒塌的建筑物),并初步绘制出勘测区域的地图。
昆虫机器人是指背部安装片上系统的马达加斯加发声大蠊(一种大型蟑螂),利用神经肌肉学原理,将芯片与控制蟑螂腿部运动的脑神经相连,通过遥控的方式控制蟑螂行动。无人机通过遥控设备,将昆虫机器人限定在特定区域内,在该区域内昆虫机器人可自由移动,并通过无线电信号向无人机回传数据。当昆虫机器人彼此接近时,可利用无线电信号相互通信。收集分析昆虫机器人的回传数据,即可绘制出该区域的粗略地图。完成对某个区域的数据采集后,无人机会控制昆虫机器人移动到相邻的未探索区域,重复勘察过程。
这一系统适用于在倒塌的建筑物等GPS信号难以覆盖的区域进行搜救。
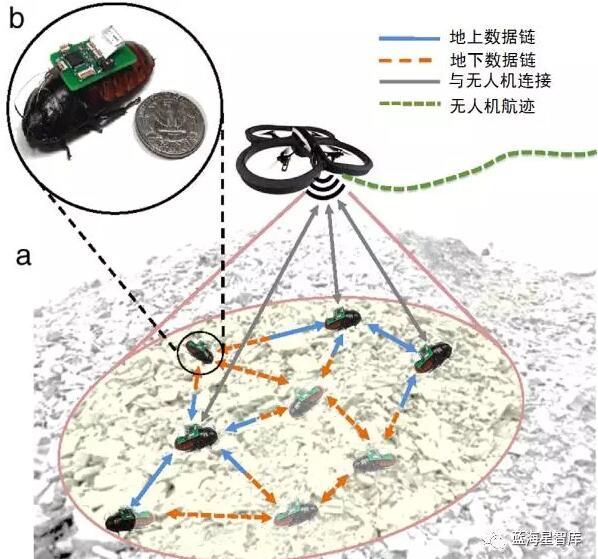
通过无人机和昆虫机器人勘查未知区域示意图
韩国科研人员研制出仿龙虱型水下足式机器人
韩国防务研究所科研人员设计了仿龙虱型水下足式机器人,通过水下运动模式生成机制控制机器人的腿部动作和行进方式。
一般无人潜航器多采用螺旋桨推进方式,依靠桨舵系统操纵,机动能力较差。韩国研究人员设计了一种仿龙虱型水下足式机器人,运动机构为铰链式仿生机械腿,能在海底爬行和水中游动,更机动灵活,可满足多种水下作业要求。研究团队通过记录和分析龙虱的运动动作,利用Matlab重构其水中前行方式,采用傅里叶均方拟合方法建立了运动方程。机械腿上安装增量编译器,监控各关节点的精确位置。机器人安装视觉传感器,可根据前方环境的反光率来识别路径与障碍物,实现自动导航与寻地。研究人员在水池中对机器人样机进行了游动及爬行试验,机器人表现出较好的操纵性和机动能力,能够有效躲避障碍物。
仿龙虱型水下足式机器人有游动和爬行两种运动方式,机动能力较强,可执行海底勘探、浅滩持续监视等任务。
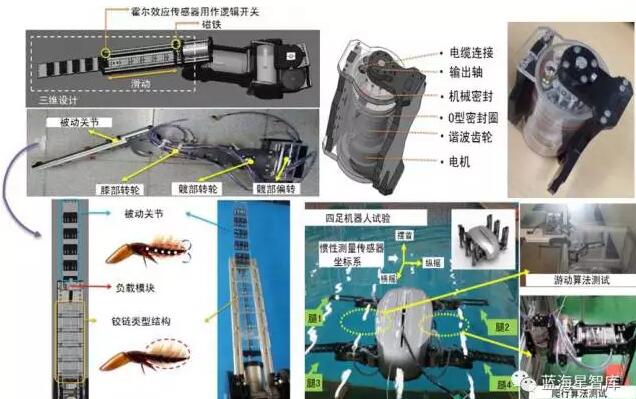
仿龙虱型水下足式机器人(左为机器人腿部结构,右上为腿部电机结构,右下为试验情况)








